Johannes James
I recently defended my Ph.D. on high step-up power conversion, wireless transmission, and waveform generation for piezoelectric flapping wing insect robots in the Autonomous Insect Robotics Lab advised by Sawyer Fuller at the University of Washington. I’m honored to have had several media outlets spotlight my projects. First-Author Publications:
|
|
ResearchI am most interested in micro-robotics and alternative energy, but am excited for a wide range of opportunities. Here are some highlighted publications - please see my Google Scholar for my complete works. |
Highlighted Work |
|

|
Magnetically coupled resonators for wireless power transmission to insect sized flapping wing robotsJohannes James, Xingyi Shi, Joshua R. Smith, and Sawyer B. Fuller Hilton Head Workshop on Solid-State Sensors, Actuators, and Microsystems, 2024 This work demonstrates wireless power transmission to a flying robot too light to carry batteries by using a technology similar to the wireless power famously used by Nikola Tesla: magnetically coupled resonators. I used a custom optimization routine, finite element EM analysis, and scripted CAD/CAM to create ultra light-weight resonant receiver coils which can be carried by the insect robot and power the wireless robot. |
|
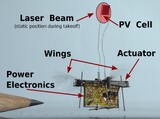
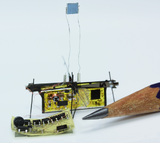
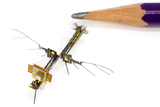
Liftoff of a 190 mg Laser-Powered Aerial Vehicle: The Lightest Wireless Robot to FlyJohannes James, Vikram Iyer, Yogesh Chukewad, Shyamnath Gollakota, and Sawyer B Fuller ICRA, 2018 paper / This work presents a significant milestone in the achievement of flight autonomy: the first wireless liftoff of a 190 mg aerial vehicle. Our robot is remotely powered using a 976 nm laser and integrates a complete power electronics package weighing a total of 104 mg. |
All Publications |
|

|
RoboFly: An insect-sized robot with simplified fabrication that is capable of flight, ground, and water surface locomotionYogesh M Chukewad, Johannes James, Avinash Singh, Sawyer Fuller IEEE Transactions on Robotics, Volume 5, No. 44, 2021 This work shows some of Yogesh Chukewad’s contributions to the robot control by demonstrating robot locomotion on the ground and on the water surface, significantly expanding the capabilities of the robot and leveraging its small size to vastly increase potential applications. In this work, power measurements were vital to characterize the cost of transport. |

|
A new robot fly design that is easier to fabricate and capable of flight and ground locomotionYogesh M Chukewad, Avinash T Singh, Johannes James, Sawyer B Fuller 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021 Previous flying insect robot designs have demonstrated controlled flight, but were limited in terms of locomotion capabilities outside of flight. They also consisted of many parts, making them difficult to fabricate. In this work we presented a re-design that lowers the center of mass, allowing the robot to additionally land without the need for long legs. Furthermore, we show that the new design allows for wing-driven ground locomotion. |
|
A high-voltage power electronics unit for flying insect robots that can modulate wing thrustJohannes James, Sawyer B Fuller ICRA, 2021 paper / This work presented a system capable of modulating thrust for the generation of forces and torques required for control of flapping-wing insect sized robots, critically necessary for realizing controlled flight. A novel repetitive control law was able to learn the requisite flapping control signals completely from scratch without model inversion or other feedback control. This research was conducted at home during the pandemic lockdown, and featured a very interesting instrumentation challenge as well: a custom 5-channel high-side current measurement PCB using isolation amplifiers measured the current to the robot actuators from the power electronics in high-bandwidth measurement; a custom torque sensor using a capacitive pickup displacement transducer and beam mechanics theory measured wing thrust; and a great deal of LabVIEW, C, and oscilloscope integration directed the experiment and data collection, with analysis performed in Python. |

|
Wireless steerable vision for live insects and insect-scale robotsVikram Iyer, Ali Najafi, Johannes James, Sawyer Fuller, Shyamnath Gollakota Science robotics, Volume 5, No. 44, 2020 This work demonstrates superlative technical skill by Vikram Iyer and Ali Najafi in interfacing my UW Robofly piezoelectric actuator and power electronics with a wireless camera system equipped with inertial measurement. The sensor “backpack” was carried by a living beetle as well as a vibratory robot, and the camera was steered by the piezoelectric actuator. Camera steering commands, IMU measurements, and images can be transmitted over wireless link to smartphone. |
|
An insect-sized robot that uses a custom-built onboard camera and a neural network to classify and respond to visual inputSivakumar Balasubramanian, Yogesh M Chukewad, Johannes James, Geoffrey L Barrows, Sawyer B Fuller 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), 2018 This work demonstrates a new, custom-built, low-weight (26 mg) camera mounted on a 74 mg flapping-wing robot. A convolution neural network (CNN) classified images measured by the custom camera in order to determine correct insect robot control actions such as whether to approach reward or instead escape predation. |
|
Original design and source code from Jon Barron, modified by Leonid Keselman, and email scrambler by Jeff Donohue. |